Tracking multiple high-density homogeneous targets [1]

|

|
|
|
Abstract
We present a framework for multi-target detection and tracking that infers candidate target locations in videos containing a high-density of homogeneous targets. We propose a gradient-climbing technique and an isocontour slicing approach for intensity maps to localize targets. The former uses Markov Chain Monte Carlo to iteratively fit a shape model onto the target locations, whereas the latter uses the intensity values at different levels to find consistent object shapes. We generate trajectories by recursively associating detections with a hierarchical graph-based tracker on temporal windows. The solution to the graph is obtained with a greedy algorithm that accounts for false positive associations. The edges of the graph are weighted with a likelihood function based on location information. We evaluate the performance of the proposed framework on challenging datasets containing videos with high density of targets and compare it with six alternative trackers.
File formats
Detection and trajectory files are provided in Matlab format (.mat) where each .mat file is composed of N rows and M columns with the following structures:
- Detections: Rows are the detections. In the case of Bees, Ants and Cells, columns represent the following elements "x coordinate, y coordinate, ellipse minor semi-axis, ellipse major semi-axis, ellipse orientation, energy, frame number". In the case of ETH-Bahnhof, ETH-SunnyDay, PETS2009-S2L1 and TUD, detections are taken from external websites (see below)
- Trajectories: Rows are the trajectory states. In the case of Bees, Ants and Cells, columns represent the following elements "target identity, x coordinate, y coordinate, frame number". In the case of ETH-Bahnhof, ETH-SunnyDay, PETS2009-S2L1 and TUD, columns represent the following elements "target identity, x coordinate, y coordinate, bounding box width, bounding box height, frame number"
Tracking and evaluation software
The use of the software is free for research and educational purposes only at the condition of respecting the requested citation acknowledgment (see [1]).
The software is divided into two categories: point targets and extended targets. Each category contains two set of files: tracking software and evaluation software. The tracking software contains object detections and generates the tracking results (estimated trajectories). The evaluation software contains ground-truth and estimated trajectories. Note that it is possible to run the evaluation software without running the tracking software.
Point targets (e.g. insects)
1Note: This software has been tested on Matlab 2012b. Older or newer versions of Matlab might provide different results than those published on [1].
Extended targets (e.g. people)
2Note: This software has been tested on Matlab 2014a. Older or newer versions of Matlab might provide different results than those published on [1].
Detection and tracking results, datasets and ground truth
The use of these datasets and data is free for research and educational purposes only at the condition of respecting the requested citation acknowledgment. If you use the Bee dataset please cite [1].
| Bees | detections (.zip, 709Kb) | trajectories (.zip, 266Kb) | video results (.zip, 108Mb) | dataset (.zip, 23.8Mb) |
| Ants | detections (.zip, 4.2Mb) | trajectories (.zip, 1.3Mb) | video results (.zip, 109.4Mb) | dataset (website) or dataset (.zip, 154.3Mb) |
| Cells | detections (.zip, 66Kb) | trajectories (.zip, 60Kb) | video results (.zip, 4.1Mb) | dataset (.zip, 1.2Mb, no groundtruth) |
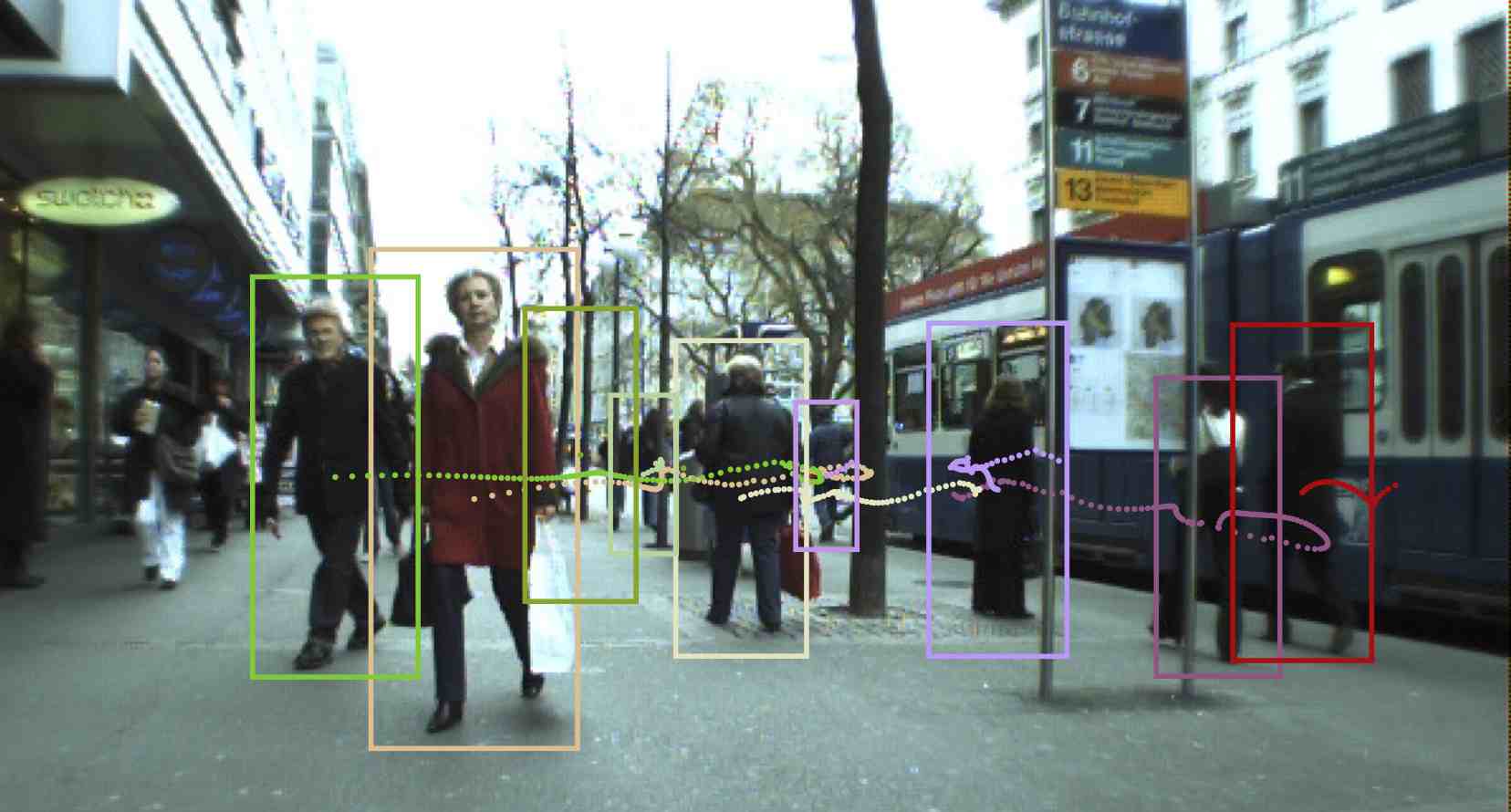
| ETH-Bahnhof | detections (website) | trajectories (.zip, 203Kb) | video results (.zip, 18.8Mb) | dataset (website) |
| ETH-SunnyDay | detections (website) | trajectories (.zip, 52Kb) | video results (.zip, 7.5Mb) | dataset (website) |
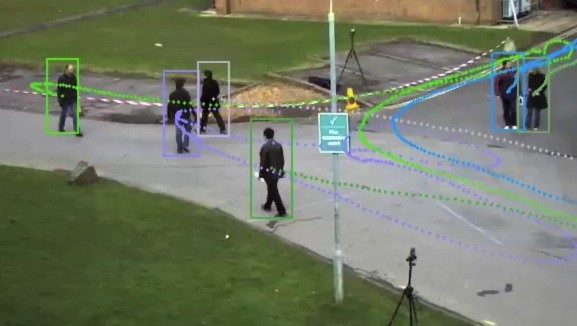
| PETS2009-S2L1 | detections (website) | trajectories (.zip, 56Kb) | video results (.zip, 24.1Mb) | dataset (website) |
| TUD | detections (website) | trajectories (.zip, 16Kb) | video results (.zip, 3.4Mb) | dataset (website) |
Detection and tracking: video results
| Bee dataset: detection | Bee dataset: tracking |
| Ant dataset: detection | Ant dataset: tracking |
Tracking: video results
| ETH-Bahnhof dataset | ETH-SunnyDay dataset |
| TUD dataset | PETS2009-S2L1 dataset |
Reference
[1] F. Poiesi, A. Cavallaro, "Tracking multiple high-density homogeneous targets," IEEE Transactions on Circuits and Systems for Video Technology, (to appear) pdf
Acknowledgments
This work was supported in part by the Artemis JU and in part by the UK Technology Strategy Board through COPCAMS Project under Grant 332913.
Contact
| Please send your feedback and comments to |
|