|
Overview
This
page provides the datasets, ground truth and the software implementation
of performance measures to
evaluate a video tracking algorithm using the protocol defined in [1] and
whose block diagram is shown below in Fig. 1.
The
protocol is based on a set of trials
with perturbations on the data
that enable an objective performance evaluation of trackers with respect
to ground truth information using the lost-track-ratio (λ) curve.
The use
of the software (PFT) is free for research and educational purposes only
at the condition of respecting the requested citation acknowledgment.
Please
send your feedback and comments to pft@spevi.org
Reference
[1]
T. Nawaz, A. Cavallaro, PFT: A
protocol for evaluating video trackers, in Proc. of IEEE Int. Conf. on
Image Processing, Brussels, 11-14 September 2011 pdf
Downloads
Software implementation of the
performance measures - Source code
(.zip, 188KB, Matlab)
Test
sequences and ground truth (.zip,
341 MB)
Perturbations
of initializations and variations of test sequences Modified
input for trackers (.zip,
1.63 GB)
Submit your results!
We encourage you to submit your
tracking evaluation results obtained on the whole PFT protocol or on
separate PFT trials. Results can be submitted for any number of trials,
but should include all the sequences for that trial.
Please send your results in the form of a
.zip folder to pft@spevi.org
The folder should include
-
the pdf of your published paper or a web
link to it
-
the tracking result files (using the format described here)
-
the AUCλ scores on the
trial(s) with all the four video sequences (using the format described here)
After the submission, your results will be
checked and then added here
The
targets in the protocol
 vehicle (H1)
from PETS 2000 dataset vehicle (H1)
from PETS 2000 dataset
 person (H2)
from PETS 2010 dataset person (H2)
from PETS 2010 dataset
 head (H3) from Clemson dataset head (H3) from Clemson dataset
 head (H4) from SPEVI dataset head (H4) from SPEVI dataset
Block
diagram of the protocol
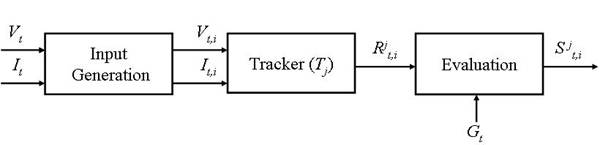
Figure 1: Schematic
diagram of the evaluation Protocol for Tracking (PFT).
Vt and It are the input video
sequence and the corresponding target initialization data, respectively.
Vt,i and It,i
are the input to the tracker after appropriately modifying Vt
and It for the
tests.
Rjt,i is the trajectory estimated by tracker
Tj
on trial i, Sjt,i
is its final evaluation score computed with reference to the ground truth
Gt.
|